while using Grafana to put my compute center under comprehensive monitoring and alerting, I played with connecting the BirdyIO event database with a custom dashboard dynamically shared on this blog entry… cool stuff, very useful for other projects, such as: AirStation and StratoExplorer.
live data:
focus on 2021 nesting season:
Below we focus specifically on the 2021 spring/summer season. One can easily distinguish initial nest-“scouting” activity, followed by active nesting (with predominantly directed in/out traffic) in May 2020. For this activity, bird species was visually identified as: great tit (Parus major). The nesting ended sharply with the youngsters moving out and adding a terminal peak of non-directed activity. Interestingly, in June 2020 there was a secondary wave of serious in/out traffic, without visible signs of true nesting activity. Perhaps this is to be attributed to food search and insect having accumulated inside the birdhouse ?
we have not yet received any bookings on BirdyBnB this year, but looking forward to hosting new guests !
For if one considers an observer in free fall, e.g. from the roof of a house, there exists for him during his fall no gravitational field
Albert Einstein (1907, “happiest thought of my life”)
mid September 2021 at the Dübendorf Swiss Airforce field, close to Zürich: After almost 2 years of waiting due to the covid-19 pandemic and its effects on aerospace activities, I was very happy to finally stand on the tarmac right next to the Zero-G Airbus A310. The aircraft has modified controls and therefore is released in the “experimental” category. With a total of three pilots who independently operate pitch, roll and throttle during parabolic flight, ballistic parabolas can be flown with high precision. In fact, the plane is routinely used by ESA for training missions, for international research and, capacity permitting, also for chartered flights.
This flight was mentored by ESA senior astronaut Jean-François Clervoy (that lucky guy flew on board the Space Shuttle for 3 times and took part in the EVAs for in-flight repair of the Hubble Space Telescope). We flew a total of 14 zero-g parabolas and 2 additional parabolas with marsian (3.7 m/s2) and lunar (1.6 m/s2) gravity respectively.
J-F. Clervoy and me
The flight track went from Zürich via Grenoble to the Côte d’Azur and to a position abeam the northern tip of Sardinia – and back. The crew kept everyone well informed about the sequence of maneuvers: Countdown to an initial raise in pitch angle (“pull-up”, during which we experience roughly 2g of “heaviness”) … 10° … then climbing steeper 30° … up to (a pilot’s horror) 50° nose-up attitude:
“Injection !”, engine noise is reducing to idle and here we are: Weightless for about 25 seconds – what a beautiful sensation, I could not get enough from it !
Eventually, the voice from the cockpit is counting backwards for “pull-out”, smashing everyone back to that side of the aircraft’s interior designated by the gravitational field of the Earth to be the floor rather than its ceiling. For the first few parabolas, I had to admit to myself that all prior mental or physical resolutions on how to best deal with weightlessness had to be thrown overboard and experience had to be gathered by practice.
inside the Zero-G Airbus A310
Just a few notes:
The vestibular system is unable to work reliably without the usual gravitational acceleration from “below”. It’s absence however is masked by all kind of other accelerations you pick up by either pushing yourself against the aircraft interior or absorb momentum from other people bumping their body parts into yours. With only visual reference remaining in a nearly all-white cabin, after a few pirouettes, it’s really hard to evaluate the true orientation of one’s body.
Once a parabola comes to it’s end, it is vital to make sure you have your feet where your feet are supposed to be when gravity is “turned back on” again. I remember one incident when I was floating right behind the back of another person, taking a glimpse through his pair of legs, eventually finding my head close to his ankles when I heard the countdown towards pull-out. The initial thought of: “I am right, the other guy must be wrong” quickly turned into despair realizing that the other person was one of the cabin safety staff who was correctly “standing” towards firm ground – while I was set to land head first. Eventually, he gave me a helping hand to hurdle me around before it was too late.
While floating in the cabin, it is quite difficult to keep a stable position in order to take pictures. The laws of physics, specifically the conservation of (angular) momentum, are playing constant games with you. If you abruptly stretch your arm in a certain direction, i.e. to reach out for a hold or to do an intuitive balance movement, you are actually propelled away into the opposite direction. As a consequence, for the first few parabolas I was floundering around quite helplessly. Eventually, I learned to smoothen my movements and adopt a more “zen” attitude towards the zero-g environment.
two zero-g scenes filmed by myself:
Knowing the sensation of jumping from a springboard, or from turbulence aboard an aircraft, I was prepared to encounter weightlessness as an overwhelming or perhaps fearful sensation of falling. But it wasn’t at all like this ! The effect sets in very smoothly without the nauseating feeling of falling (Note: We could not look outside. For the initial half of the zero-g phase, the aircraft was actually still climbing on a ballistic trajectory for approx. 850m, post apogee falling for the same distance prior to “pull-out”). What prevails is the sensation of feeling light as a feather while still being conscious of one’s own mass.
Finally, here’s a reference to a nice explanatory video from a different flight and crew:
Insights into the complex flying technique, Video by Tom Scott
In 2020, while watching small birds nesting in my garden, I decided that I wanted to learn more – from a time series data mining point of view – about their apparent restless activity. After some initial brainstorming I realized I got into something really cool relating to digital electronics, sensors and signal processing & storage. Here’s some implementation detail:
+ Birdhouse fitted with dual-channel, pulsed-IR (38kHz) barriers
+ Atmega 328 µ-Controller acting as pulse source for the IR LEDs
+ Postgres database for long term event storage
+ NodeMCU ESP8266-12E µ-Controller as master:
fifo-type binary event buffer for 2 event channels (IR light barriers)
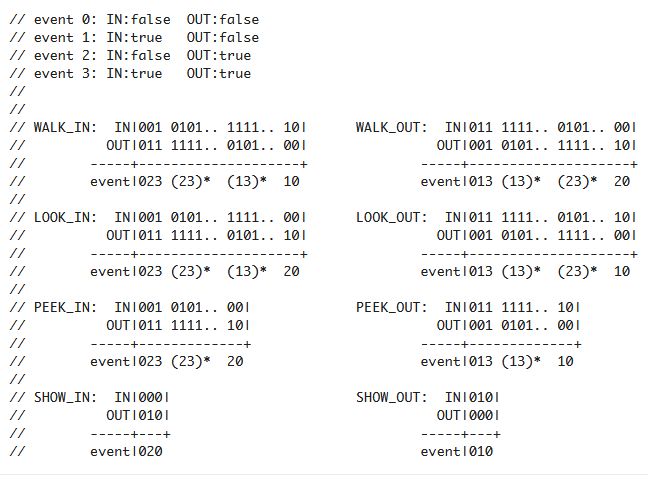
regular-expression style evaluation of event pattern + pattern duration (see table below):
detection of direction: (out > in) vs. (in > out) and depth of a connected action:
show: penetrate, retract from single barrier
peek: penetrate, retract through two barriers
look: penetrate, retract through two barriers, freeing initial one
walk: penetrate, retract through two barriers, passing both ones
anti-flicker filtering, suppressing repeated state alternations < 10ms
detection loop frequency achieved: ~ 800Hz
NTP time sync
periodic sensor self-checks on IR barrier function
birdhouse connected to wifi home network
local buffering of up to 200 qualified events in a transactional log
birdhouse webservice (json) endpoint to deliver event logs to a backend
Server backend (python) polling BirdyIO endpoint for new events
Event table
how this looks like in practice
full in/out transitions and other events in the 2020 nesting season
sample JSON message delivered by BirdyIO endpoint
directed in>out / out>in transitions (blue) and other activities (red) in the 2020 season
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept All”, you consent to the use of ALL the cookies. However, you may visit "Cookie Settings" to provide a controlled consent.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duration
Description
cookielawinfo-checkbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checkbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.